
Waymo, azienda del gruppo Alphabet, ha inaugurato il primo servizio di taxi senza conducente al mondo. Gli abitanti di Phoenix, Arizona, potranno usare l’app Waymo One per prenotare la propria corsa ed essere scarrozzati da un auto a guida autonoma in un’area di 50 miglia quadrate. Un traguardo importante dopo un anno di test con qualche centinaio di clienti e a distanza di 11 anni dall’inizio delle sperimentazioni su strada.
Livelli di autonomia delle auto
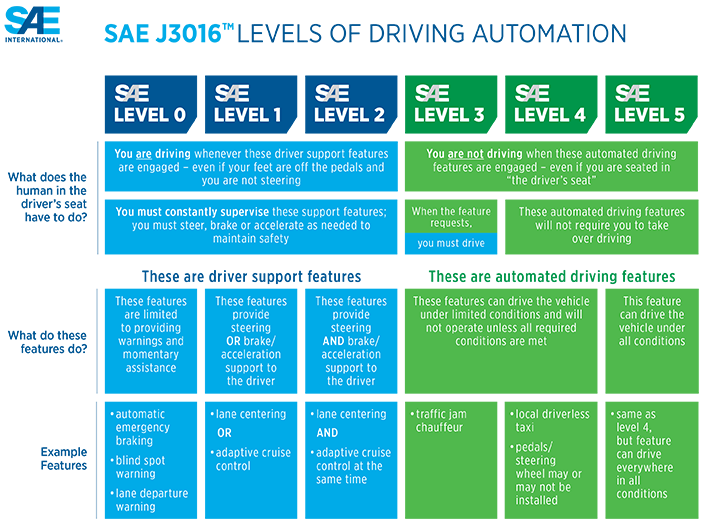
Ma cos’è un’auto a guida autonoma? Per essere precisi, anche se nella pratica è invalso l’uso di questa dizione, più correttamente si dovrebbe parlare di auto a guida automatica, in modo da non mettere in mezzo il concetto di autonomia che implicherebbe una qualche forma di coscienza. Ma aldilà delle dispute terminologiche per capirci qualcosa si può usare la tassonomia sviluppata dalla SAE (The Society of Automotive Engineers) che definisce 6 livelli di automazione.
Nei primi tre livelli il guidatore ha sempre il controllo completo, anche se alcuni automatismi sono attivati. Nei successivi livelli il conducente non guida, ma si limita ad un’attività di supporto o supplenza.
- Livello 0: assenza di automazione. I controlli dell’auto sono completamente manuali, ma il sistema può segnalare alcuni eventi al guidatore (punti ciechi, fuori corsia, frenata d’emergenza)
- Livello 1: l’auto dispone di un qualche sistema di automazione, ad esempio quello che controlla e stabilizza la velocità impostata dall’uomo (cruise control) o mantiene la corsia
- Livello 2: il veicolo ha più sistemi di automazione, ad esempio può sterzare e accelerare automaticamente, ma il conducente controlla le attività e può prendere il controllo in qualunque momento
- Livello 3: l’auto può svolgere la maggior parte delle funzioni di guida, ma in determinate condizioni. Per esempio nel caso di traffico congestionato, cede i comandi al guidatore
- Livello 4: l’auto guida da sola, ma in aree limitate e a certe condizioni. L’opzione umana è sempre attiva
- Livello 5: il veicolo è completamente automatizzato in qualunque circostanza. Non c’è bisogno di attenzione da parte di un umano.
Come funzionano le auto senza guidatore?
I veicoli senza guidatore sono tra gli “smart object” più complessi perché devono imparare a “vedere” l’ambiente circostante e prendere le opportune decisioni, in movimento. Per questo necessitano di diverse tecnologie hardware che acquisiscono dati utili e di software basati su algoritmi di intelligenza artificiale in grado di combinarli e dargli un senso.
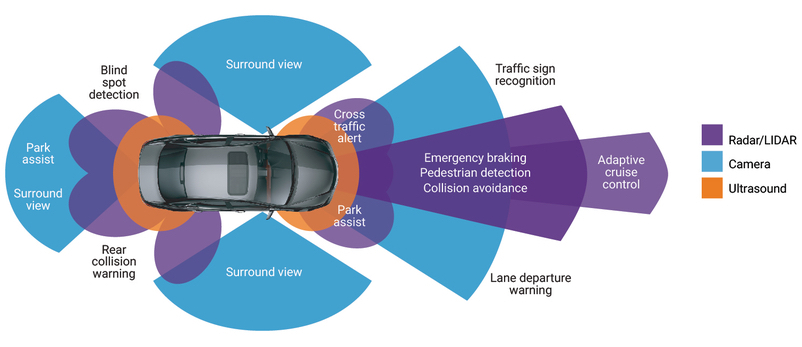
- Radar (Radio Detection and Ranging) servono a stimare la distanza e velocità degli oggetti, usando le onde elettromagnetiche. Possono avere problemi ad individuare oggetti non metallici o che hanno forme particolari. Scansionano l’ambiente di fronte fino a circa 200 metri di distanza. Solitamente sono istallati avanti e dietro l’auto.
- LiDAR (Light Detection and Ranging) è uno scanner che misura le distanze usando la luce anziché le onde elettromagnetiche. In pratica illumina con un laser gli oggetti e le superfici e misura il tempo trascorso fra l’emissione dell’impulso di luce e la ricezione del segnale di ritorno. Viene montato sul tettuccio e ruota di 360 gradi in modo da mappare tridimensionalmente l’ambiente.
- Videocamere che sono usate per “vedere” i segnali stradali, i semafori, i pedoni e ogni oggetto in prossimità del veicolo, ma anche gesti compiuti da persone.
- Sensori ad ultrasuoni che servono a rilevare oggetti molto vicini al veicolo per evitare collisioni
- GPS (Global Positioning System) è il sistema basato su satelliti che indica la posizione precisa dell’automobile nella mappa usata per la navigazione
- IMU (Inertial Measurement Unit) è l’unità che combina accelerometri, giroscopi e magnetometri per misurare altri stati del veicolo come la velocità e la direzione. Utile quando il segnale GPS non è disponibile (gallerie, cattivo tempo, interferenze elettromagnetiche)
- CPU è l’unità di computazione che raccoglie tutti i segnali prodotti dai diversi sensori e e li dà in pasto ad un software sofisticato che li processa (Sensor Fusion).
Gli algoritmi di machine learning hanno il compito di trasformare i dati in informazioni utili (avere una chiara rappresentazione di ciò che succede intorno) perché il veicolo possa essere in grado di prendere decisioni e agire a tempo debito. Addirittura i nuovi modelli di machine learning non si limitano alla comprensione del presente, ma prevedono le traiettorie degli altri veicoli.
Il futuro dell’auto a guida autonoma
Gli sviluppi futuri naturalmente dipendono dall’evoluzione sia hardware che software, ma anche dai movimenti competitivi.
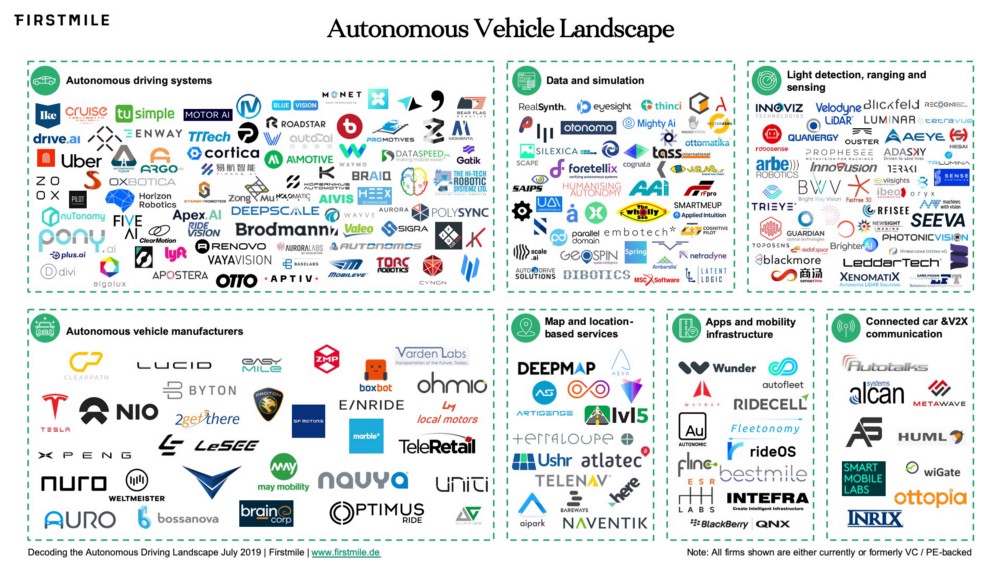
Tutti i grandi costruttori di auto hanno investito in qualche startup specializzata, alcuni a scopo esplorativo, altri con più convizione, tra questi GM che ha acquisito Cruise, Volskwagen che ha finanziato Argo, Toyota che ha investito in Pony.ai, BMW e Daimler che puntano su Aurora.
Poi ci sono le aziende più tecnologiche come Waymo, la cinese DiDi, Tesla, Apple con la timida acquisizione di Drive.ai e Amazon con quella della promettente Zoox.
Dal punto di vista hardware ci sarà da tener d’occhio i progressi di processori specializzati come quelli di Graphcore, azienda che ha creato un coprocessore specifico (Intelligent Processor Unit) che ha 59,4 miliardi di transistor su un’area di 823 millimetri quadrati.
Anche le scelte costruttive saranno importanti, ad esempio Tesla e Nissan ritengono il LiDAR superfluo (anche perché ancora molto costoso) e puntano tutto sugli altri sensori e soprattutto sulle videocamere (ma ancora la visione computazionale non garantisce i risultati del radar). Al contrario Waymo, Aurora e GM hanno acquisito produttori di LiDAR e puntano ad una integrazione verticale.
Dal punto di vista software il progresso dipenderà dall’evoluzione dei modelli di machine learning, che poggiano anche sulla quantità e qualità di dati a disposizione. Le aziende che hanno tanti dati sono Waymo e Tesla, che ha quelli prodotti dalle sue auto con Autopilot (il veicolo può cambiare corsia, accelerare, frenare, ma comunque il guidatore deve mantenere il controllo). Il tema che si pone col machine learning è quello dei rendimenti decrescenti ossia capire quanti dati sono necessari per abilitare le funzioni di guida e a che punto un ulteriore aggiunta di dati non produce risultati rilevanti.
In definitiva l’entrata in servizio di Waymo è una buona notizia, ma non vuol dire che si sia arrivati al traguardo di avere un’automobile autonoma per tutti i percorsi e tutte le occasioni. La questione è complessa e richiederà anche previsioni normative specifiche. Ad esempio un veicolo potrebbe essere certificato L5, ma poter essere abilitato alla circolazione soltanto in autostrada o in determinati contesti (Phoenix non è Roma) oppure solo in certe ore.
Insomma il percorso dell’auto senza guidatore verso la commercializzazione è ancora lungo e irto di ostacoli, tra cui quelli, da non sottovalutare, legati alla propensione umana ad accettare una perdita di controllo.


La guida autonoma fino e all livello 3 e una cosa molto positiva ,ma oltre e follia anche perché si perderanno milioni di posti di lavoro (non rimpiazzabili)quindi spero che questi grandi colossi abbiano un po’ di buon senso e si fermino all livello3 e 4solo in autostrada,anche perché ci sono città ne elenco appena 2 ma c’è ne sono tante Roma ,Napoli che e una cosa difficilissima sviluppare un livello 5 ripeto mi auguro che capiscano le problematiche che possono creare a chi con l’auto ci lavora va bene innovare ma fino e un certo punto se poi ,si intaccha il lavoratori non so fino a che punto la cosa sia positiva